The hardware part (Figure 1):
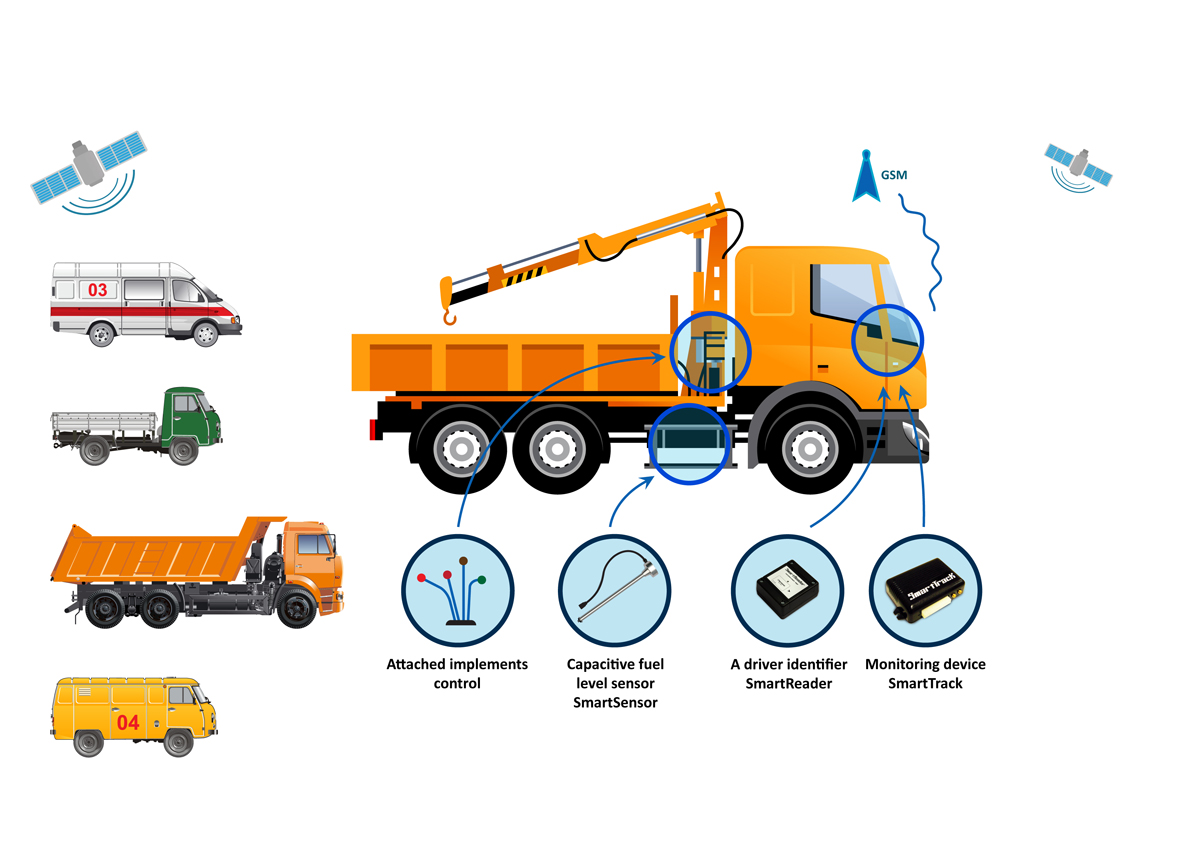
The hardware part.
Figure 1.
Control over municipal solid waste (MSW) transportation vehicles.
Collection, removal and utilization of municipal waste is one of the main goals of public utility companies, within the framework of which there are actively used transport vehicles, where fuel and lubrication materials take the lion share of expenditure. Implementation of the transport monitoring system will allow reducing the delivery time to waste utilization sites, carrying out control over the waste removal schedule as well as effectively counteracting against stealing of fuel assigned by enterprises. The chief object of the system implementation is the control over the efficiency and quality of the waste removal from a city.
Additionally solved problems for this particular area:
- Objects in service accounting (container grounds);
- Possibility of automated revealing of unauthorized events:
- loading, unloading of municipal solid waste (MSW) out of utilization zone;
- excess of a special vehicle weight norm;
- deviation of the specified routes ,etc.
- Identification of special purpose vehicles and containers with possibility of integration into access control system (ACS) on a check point;
- Control of the special purpose vehicles and containers movement;
- Control of location and time of vehicles unloading, including photo fixation of unloading site;
- Control of the fact and real duration of MSW container unloading;
- Control of real number of unloaded MSW containers;
- Control of possession of unloaded MSW containers;
- Operative management decision making in order to facilitate performance and transit routes of special purpose vehicles;
- Prevention of unauthorized landfill sites, loading, unloading of municipal solid waste (MSW) out of utilization zone.
The software part (Figure 2):
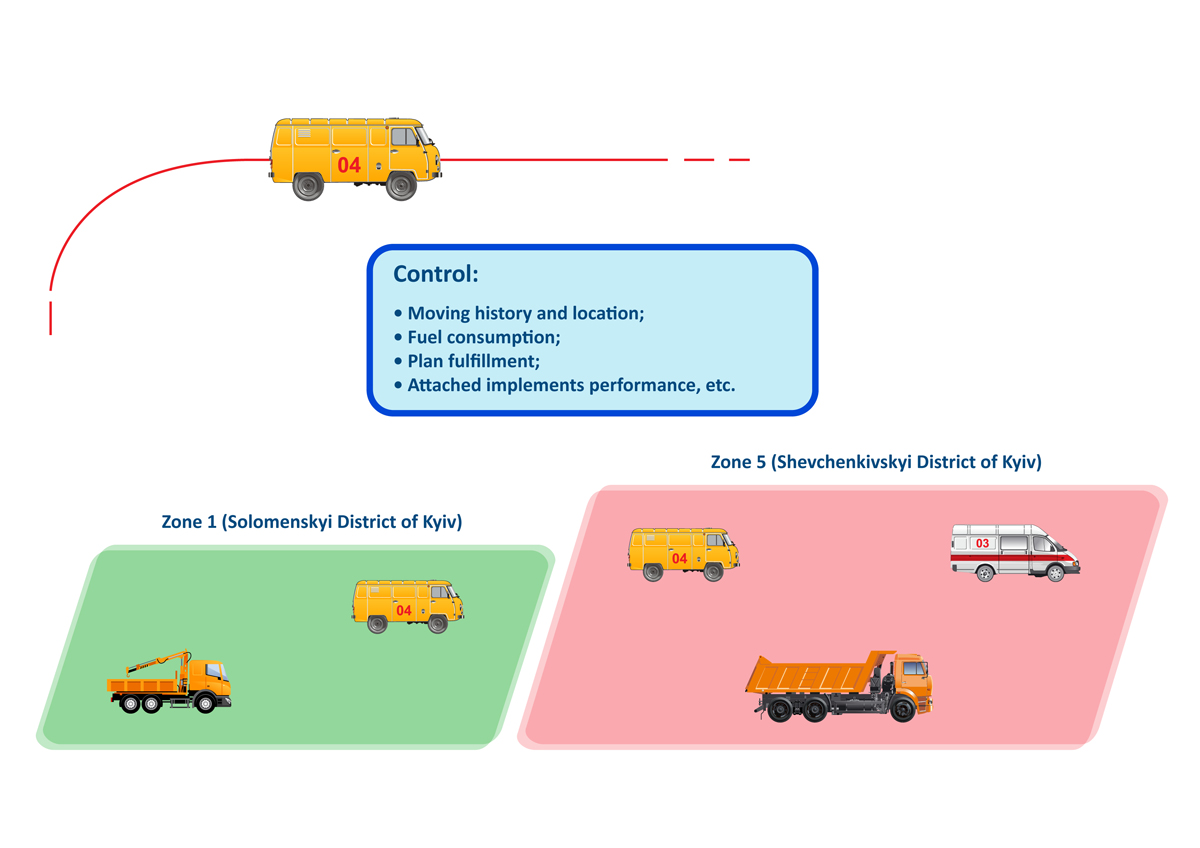
The software part.
Figure 2.
Control of technical equipment, which serves city, region and district roadways.
Control over quality and timeliness of roadways service is an important task for the administration of road and operation divisions (ROD). The chief object of the system implementation is the increase in overall performance of equipment, quality control of the performed repair work and fuel consumption control. The system will allow reducing the possibility of idle time and use of municipal vehicle for personal purposes and establishing discipline among drivers as well as improving the dispatching service performance qualit.
Additionally solved problems for this particular area:
- Control over vehicles performance of the work specified in the waybill;
- Rapid on-line response and informing in case of emergency sites on roads (holes, cracks, hillocks, ice and snow cover of road sites, road accident, jams, repairs, etc.). Providing bilateral communication between drivers and ROD dispatchers about the road situation by means of mapping with detailed description of a problem and the course of its solution.
Special purpose vehicles operation control:
- Crane, tower vehicle (control of the crane operating time, fuel consumption per moto-hour on condition of operating unit and at idle);
- Bulldozer, excavator, grader, loader, roller (control of performance, equipment idle time);
- Road marking equipment (control of the equipment operating time, fuel consumption on condition of operating unit and at idle);
- Watering, sweeping vehicles, vehicles for scattering reagents, asphalt repair equipment, snow grooming equipment (real time mode operations report on works performed, based on the dispatcher’s request, control of operating time in operating condition and at idle, fuel consumption in operating condition and at idle, control of quality and number of operations);
- Passenger technical equipment, delivery of people (control over a working shift, delivery of workers to the site).
Control of the equipment, which serves different public-owned enterprises (gas service, water services companies, telecom company’s transport, power supply companies’ vehicles)
Control of quality and timeliness of service of potentially dangerous facilities is an important task. The chief object of the system implementation is the increase of technical equipment effectiveness, control over the quality of executed repair works, and fuel consumption control. The system will allow reducing the possibility of idle time and use of municipal transport for personal purposes; it will improve the drivers’ discipline as well as dispatching service performance quality.
Additionally solved problems for this particular area:
- Control of the operations performed by technical equipment, indicated in the transportation control and movement document;
- Control of speed, mileage, engine rotation rate, filling up, fuel consumption per 100km or per moto-hour for different types of vehicles. Data comparison plan/fact;
- Special purpose equipment performance control;
- Control of operational personnel by means of manual GPS tracking devices.